
伺服控制專輯—方框圖
穩定性與控制問題
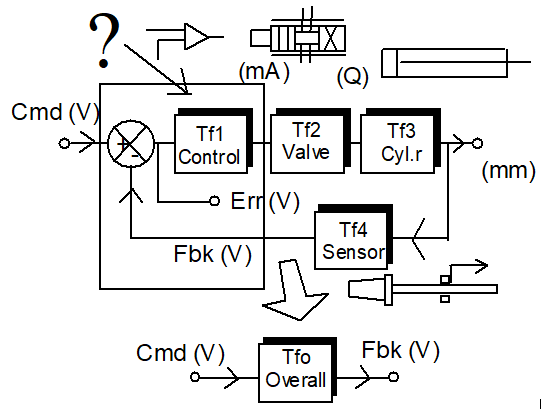
方框圖
用傳遞函數TF來表示整個系統的特性。各個環節的傳遞函數Tf1,Tf2,Tf3,Tf4共同作用,得到一個新的系統傳遞函數,可以表達輸出Fbk(V)與輸入Cmd(V)之間的關系。這就是系統Tfo的閉環傳遞函數,可以將其轉換為時間或頻率響應,用以分析系統的性能。為了得到整個系統的閉環傳遞函數Tfo,怎樣確定控制器Tf1?
開環分析
Bode和其他人(比如奈奎斯特等)創建了一種基于開環頻率響應的分析方法,用以確定控制器Tf1的性能。控制器Tf1將輸出Fbk(V)與誤差Err(V)進行比較。計算方法如下:環路中的每個環節都有一個幅度(K1,K2,K3,K4),用DB表示;和一個相位(φ1,,φ2,φ3,φ4),每個環節的幅值和相位都隨頻率變化,即為各個環節的頻率響應。在給定頻率下,整個系統開環響應的增益是各個環節的增益之積;即K1.K2.K3.K4。(用對數坐標表示)。在給定頻率下,整個開環響應的相位是各個相位的總和。即φ1+φ2+φ3+φ4。
0dB增益時的總相位滯后應不大于135°;即相位裕度大于(180-135)= 45°。(相位裕度相當于保險系數)
180°相位滯后點的增益應不大于-10dB;即增益裕度為10dB。
(注:這個可以根據要求自己設定)
增益增加時,穩定裕度會相應降低。控制器增益K1應根據系統需要做相應調整。
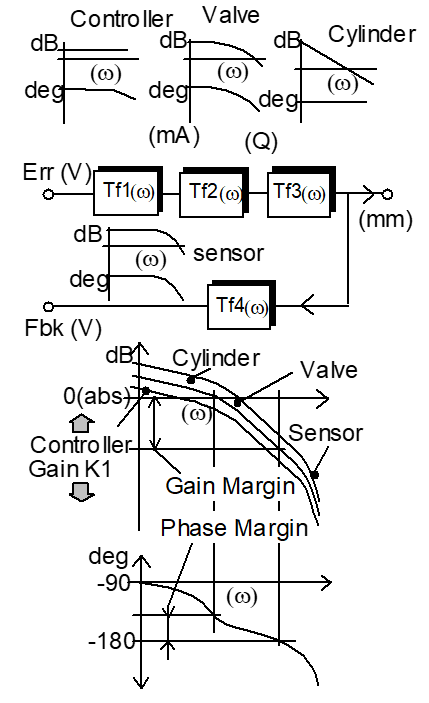
注:在以上幅頻特性和相頻特性中,橫縱標為頻率,10倍頻增加,縱坐標為幅值,單位為DB。
controller為控制器,PID的整定在此完成,PID的相關知識在下一節重點討論;valve為伺服閥,等效為二階震蕩環節,所以其幅值隨頻率的增加而衰減,相位隨頻率的增加而滯后;cylinder為油缸,油缸輸入為流量,表現出的特性是速度v=Q/A,假設被控量為位移,那么油缸就是一個積分環節1/s=1/(jw)=-j/w。所以其幅頻特性為|G(jw)|=|1/jw|=1/w。相位特性為-arctgw/0=-90°。恒定滯后90°。由此可知,積分環節的相頻特性與角頻率無關。
表明積分對輸入信號(一般為正弦信號)有90°的滯后作用,其幅頻特性為1/w,是w 的函數,當w由零變到無窮大時,輸出幅值則由無窮大衰減至零。在|G(jw)|平面上,積分環節的頻率特性與負虛軸重合。
推薦文章
-

-
液壓傳動中具有隨動作用的液壓自動控制系統。在這種系統中,大功率的液壓元件(包括液壓伺服閥和液壓執行元件) 跟隨小功率的指令信號元件動作。執行元件所控制的通常是位置、速度等機械量。指令信號元件又稱參考信號元件,它發出代表位置、速度或其他量的指令信號。大功率與小功率之比可以達幾百萬倍以上。液壓伺服系統是反饋控制系統,反饋回來代表實際狀態的信號與指令信號比較,得到誤差信號,如果誤差不是零,便進行調節。例如在高射炮自動瞄準系統中,雷達跟蹤飛機,并將信號送給指揮儀,指揮儀計算出高射炮管應處的位置,炮管的實際位置與指揮儀算出的指令位置在系統中不斷進行比較和調節,直到誤差小于許可值時才射擊。液壓伺服系統通常應包括:實際狀態的測量反饋元件;小功率指令信號的傳遞元件和大功率液壓執行元件;期望狀態和反饋狀態的比較元件;差值信號的放大元件。液壓伺服系統分為機械液壓伺服系統、電液伺服系統和氣液伺服系統。 它們的指令信號分別為機械信號、電信號和氣壓信號。電液伺服系統因電氣控制靈活而得到廣泛的應用;氣液伺服系統...
-
自從首次使用液壓和氣動技術以來,這些技術不斷發展以滿足新的應用和行業需求,并利用各種技術進步。在過去的 75 年里,《Power & Motion》(最初稱為“Applied Hydraulics ”)涵蓋了流體動力行業為提高性能、能力和滿足客戶需求所做的持續努力。 當《Applied Hydraulics》第一期于 1948 年 2 月出版時,編輯的信中表示,用于驅動和控制的液壓機構的使用已大幅增長,并且進一步增長的潛力是顯而易見的。在 1958 年 9 月號中,該出版物宣布更名為《Applied Hydraulics & Pneumatics》,以更好地反映其對如何使用流體(無論是空氣還是石油)傳輸能量的報道。正如該期編者按中所述,更名后的出版物認識到壓縮空氣和油的廣泛使用,雖然應用可能不同,但液壓和氣動解決的基本設計問題是相似的,因此能夠為那些使用其中任何一種的人員提供學習機會 技術。 快進到今天,現在液壓和氣動可以在許多市場和應用中找到。流體動力行業也正在經歷另一場演變,電子與液壓和氣動的集成(在某些情況下取代液壓和氣動)的不斷增加,以實現更高水平的效率、精度和數...




